

I’ve been hacking like a fiend on nights and weekends for the past few months trying to get ready for PyCon. This year I wanted to do an introductory talk about how you make internet enabled hardware using Python. The first step of this process is figuring out what hardware you want to make. I decided I wanted to do something for my pets as I am splitting my time between Boston and San Francisco and I can be gone for a week at a stretch. My friend Sophi gave a great talk at last years Open Hardware Summit about creating a low-cost nose poke detector for research and I decided I could sorta do a riff (in the jazz sense) on that idea. I decided to create an Open Skinner Box using a RaspberryPi and a few parts I had around the house.

Open Skinner Box in situ
A Skinner Box, also called an operant conditioning chamber, is a training mechanism for animal behavior. Generally a Skinner box is used to create some behavior “primitives” that can then be stringed together to do real behavioral science. The most basic Skinner Box has a cue signal for the animal (usually a light or buzzer), a way for the animal to respond to the cue (usually a nose poke detector or by pressing a lever), and a way to reward the animal usually using food. The general procedure is that the animal hear’s or sees the cue signal, performs a task, like pressing the button, and then gets a treat. This is not too far off with the training most people do with their pets already. For example, I have the rats trained to come and sit on my lap whenever they hear me shake a container with treats.
The cool thing about a Skinner box is that they are used to do real science. As a toy example, let’s say you wanted to test if some drug may have an adverse effect on learning. To test this scientifically you could have two groups of rats, one set of rats would get the drug and the others wouldn’t. We would then record how long it took the rats to learn how to use the Skinner box reliably. The scientist doing the experiment could then use this data to quantify if the drug has an effect and if that effect scales with the dosage of the drug.
So what does it do?
I wanted to create not just a Skinner Box but a web enabled Skinner Box, a sorta internet of things Skinner Box. So what features should it have? I came up with the following list:
- I should be able to see the rats using the Raspberry Pi’s camera.
- The camera data should be used to create a rough correlate of the rat’s activity.
- The box should run experiments automatically.
- I should be able to buzz and feed the rats remotely.
- The web interface should give a live feed of all of the events as they happen.
- The web interface should be able to give me daily digests of the rats activity and training.
The Mechanical Bits
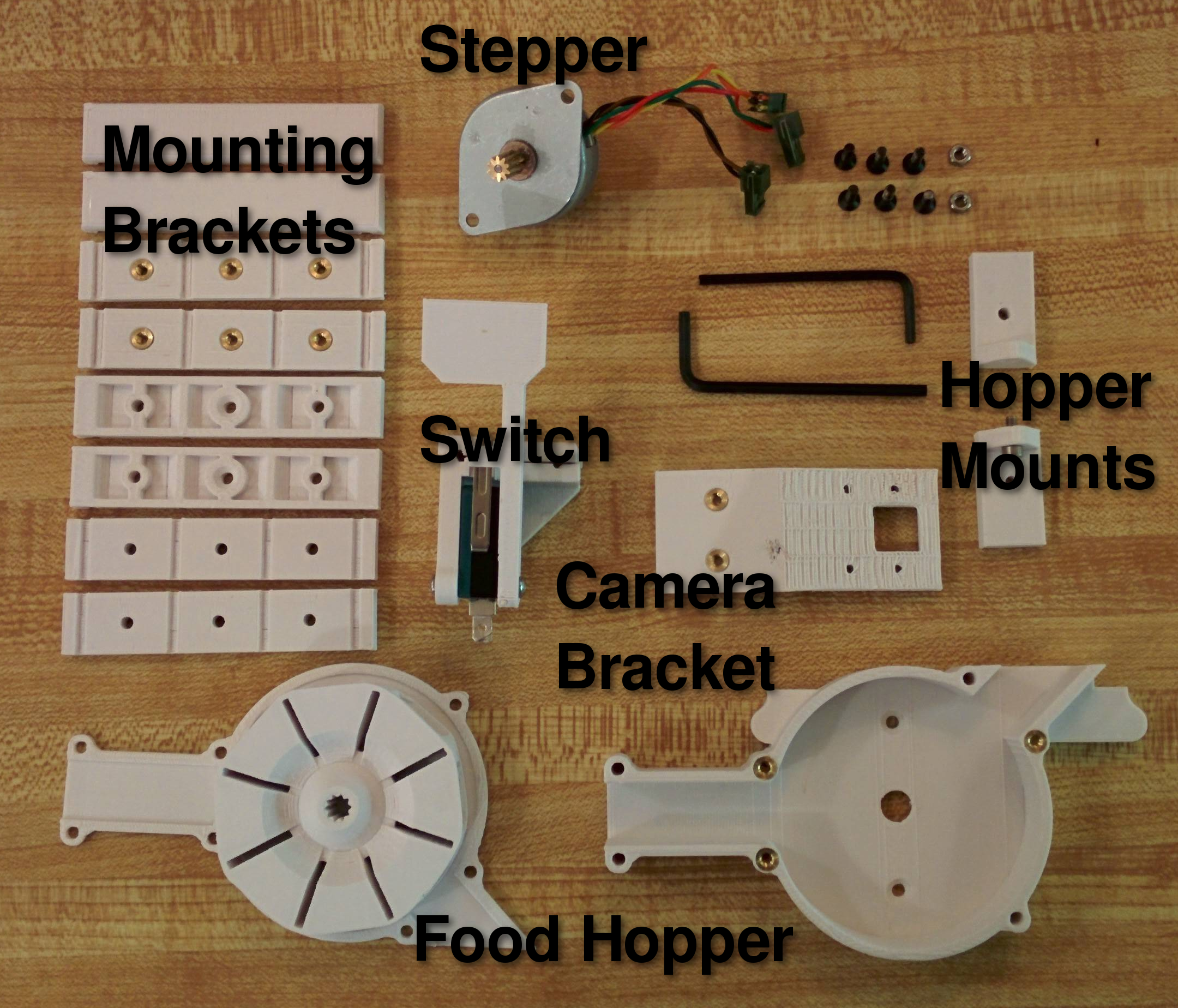
Mechanical Bits of the Open Skinner Box
To build the Skinner Box I got some help from a mechanical engineer friend of mine. He is a 3D printing whiz and designed the mounting brackets, food hopper, and switch mechanism for the Skinner Box. One of the cool things I learned in this process was how to use threaded brass inserts for mounting the parts to the cage and attaching the different parts to one another. There is a great tutorial here as well as this video. The source files for all the parts are now up on thing-a-verse if you would like to build them.
The Electrical Bits
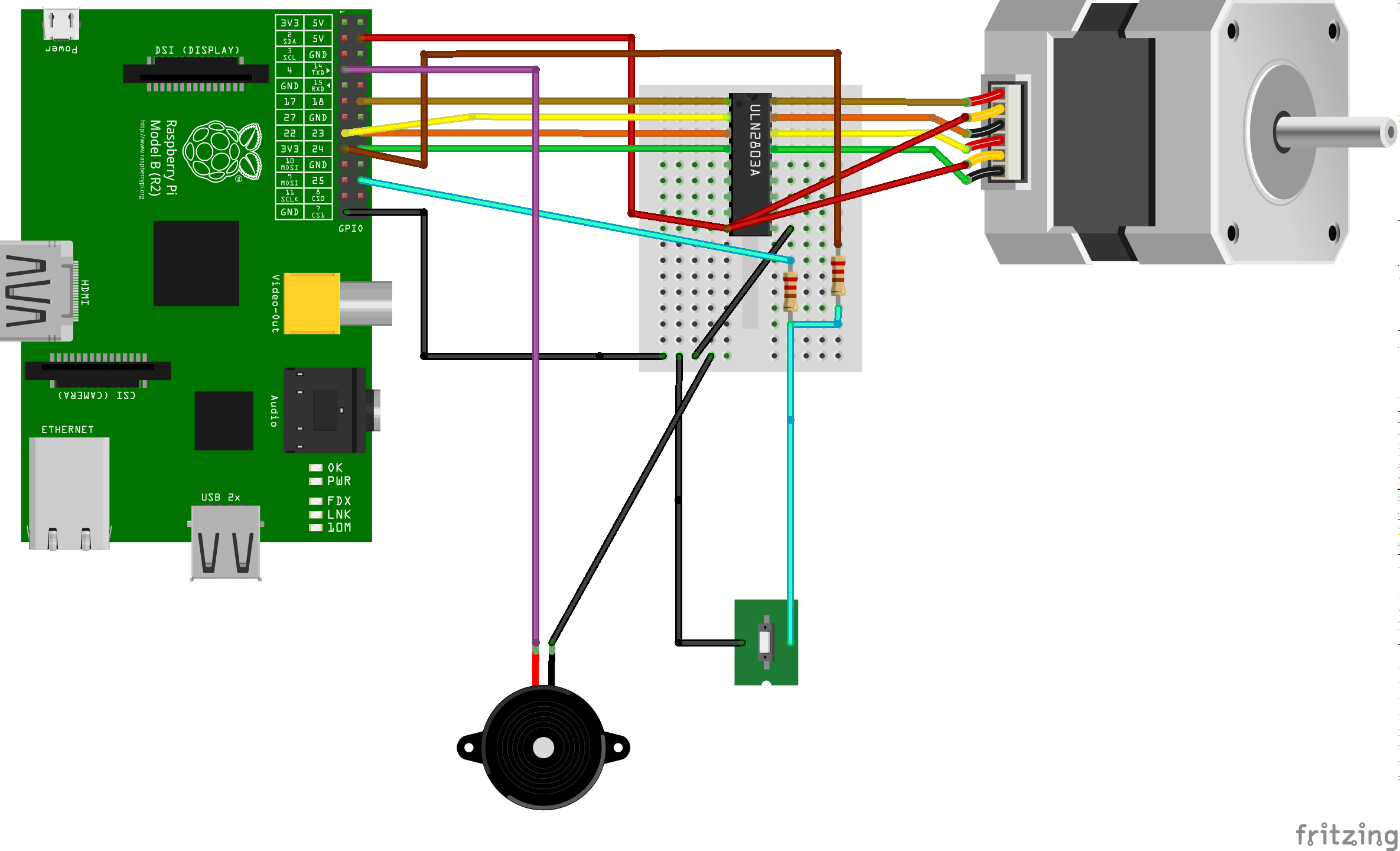
Skinner Box schematic – originals are in the github repo for the project.
For the electrical components in the project I used the Raspberry Pi’s GPIO pins to control the stepper, read the switch, and run the buzzer (although one could easily use the audio out). I opted to run the stepper using the RaspberryPi’s 5V source and it seems to have just enough juice to run the stepper motor. The stepper is controlled via four GPIO pins (two for each coil). The GPIO pins and the 5V source are connected to a LN2803 Darlington array that shunts the 5V source to the stepper based on whether the GPIO pins. In the next revision I will probably use a separate stepper driver and a beefier stepper like a NEMA 17. I soldered everything to a bread board for this revision but I will probably get PCBs fabricated for the next revision. When I was soldering and debugging the board I found ipython super useful. I could send each of the GPIO pins high or low and then trace the path with my multimeter. I have put both the Fritzing CAD files and a half-complete bill of materials up on github if you would like to replicate my work.

Finished Open Skinner Box electrical components.
The Software Bits
Because I was presenting this project as an intro lesson PyCon I wanted to use as many python libraries as possible. Right before the conference I open-sourced all of the code and put it in this github repository. Some of the components I used, for example matplotlib, are sub-optimal for the task but they get the point across and minimized the amount of java script I had to write. The entire app runs in a bottle web server with the addition of greenlets to do some of the websocket work. I set the webserver up to use Bootstrap 2.3.2 to make everything look pretty. For data persistence I used MongoDB. While you can get Mongo to build and run on a RaspberryPi in retrospect I really should have dug into the deep storage of my brain and used something like PostgreSQL. Mongo is still too unstable, and difficult to install on the Pi.
The general theory of operation is that there is the main web server that holds four modules, three of which are wrapped in a python thread class. These modules are as follows:
- Hardware Interface – uses GPIO to buzz the buzzer, monitor the switch, and run the stepper.
- Camera Interface – uses OpenCV, PiCamera, and Numpy to grab from the camera, save the images, and monitor the activity.
- Experiment Runner – looks at the current time and decides when to begin and end experiments (e.g. it rings the buzzer, waits for the rat to press the lever, and dispenses a treat.
- Data Interface – Stores event,time stamp pairs to Mongo, does queries, and renders matplotlib graphics
To get all of the modules to communicate cleanly I used a simple callback structure for each module. That is to say each module holds a list of functions for particular events, and when that event happens the module iterates through the list and calls each function. For example, whenever there is a button press the button press loop calls the callback function for the data interface to write the event to the database, a second callback tells the experiment runner that the rat pushed the lever, and a third callback renders the data to the live-feed websocket.

Rat Stats — need to replace this with some Javascript rendering.
All routes on the webserver basically point to one or more of the modules to perform a task and create some amount of data to be rendered in the bottle template engine. For example for activity monitor page I have the DataInterface module query Mongo for every activity event in the past 24 hours and I then render it using matplotlib and save the result to a static image file. The web server then renders the template using the recently updated static image file. While this works, matplotlib is painfully slow. To control the feeder and buzzer remotely I simply have post events that call the dispense and buzz methods on the hardware interface. The caveat here is that these methods are non-block and are guarded simply by a flag. So for example, if you hit the feed button multiple times in a row really fast only the first press has an effect.
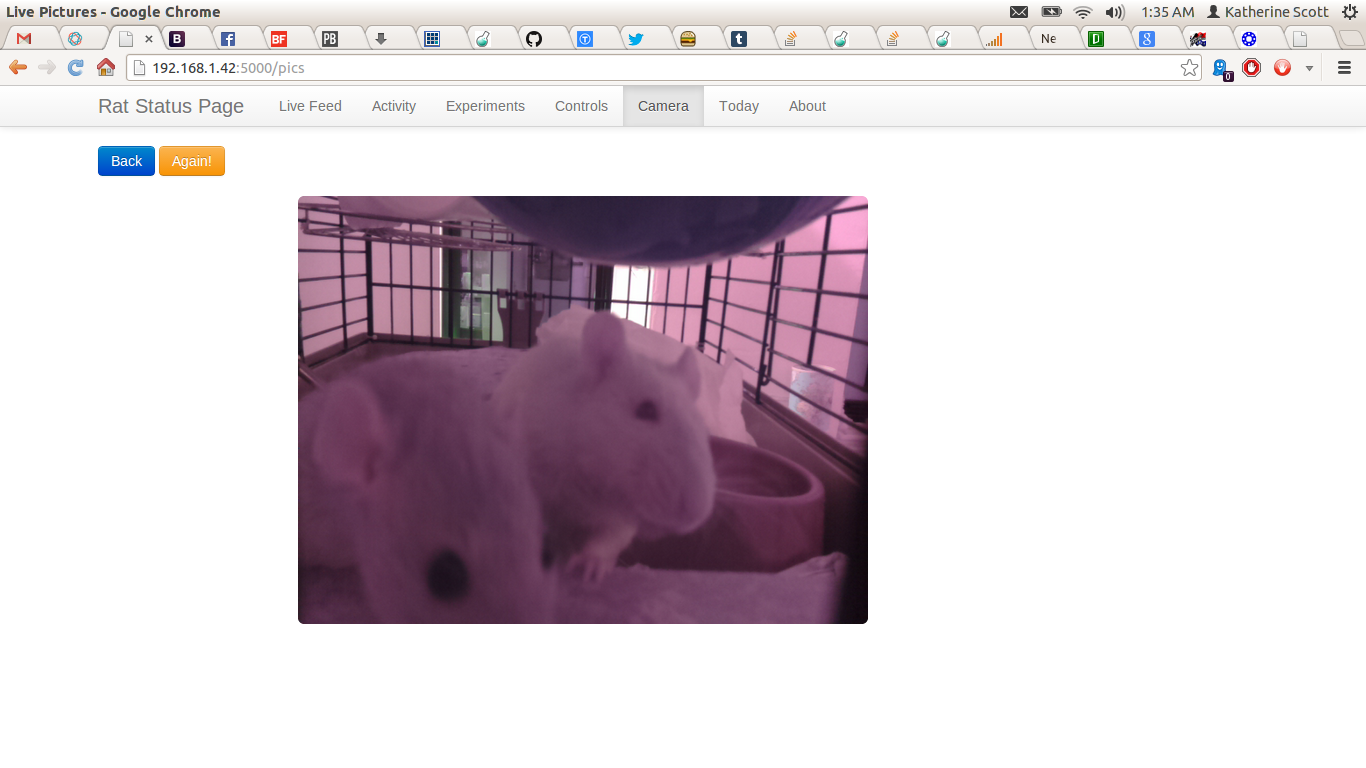
Skinner Box Live Shot
The camera module seems to work reasonably well for this project and I amazed by the image quality. The only drawback with the camera module is that basically you have to choose between still images and a stream of video data right now there is now really good way to both debuffer the camera stream and process the individual frames. I opted to take the less complex route of just firing the camera for still frames at the fasted rate it would support which is about once a second. Because of processing limitations on the pi I need to scale the image down to about 600×800 to do my motion calculation. For the motion calculation I just perform a running frame difference versus a more computationally costly optical flow calculation. This is a reasonably good approximation of net motion but it is subject to a lot of spikes when the lighting changes (e.g. when you turn the lights for the room on). Additionally in my haste of getting this project up and running I opted not to put a thread lock around the camera write operation. This means that sometimes when you visit the live image page you get a half finished frame. This is something that I will address soon.
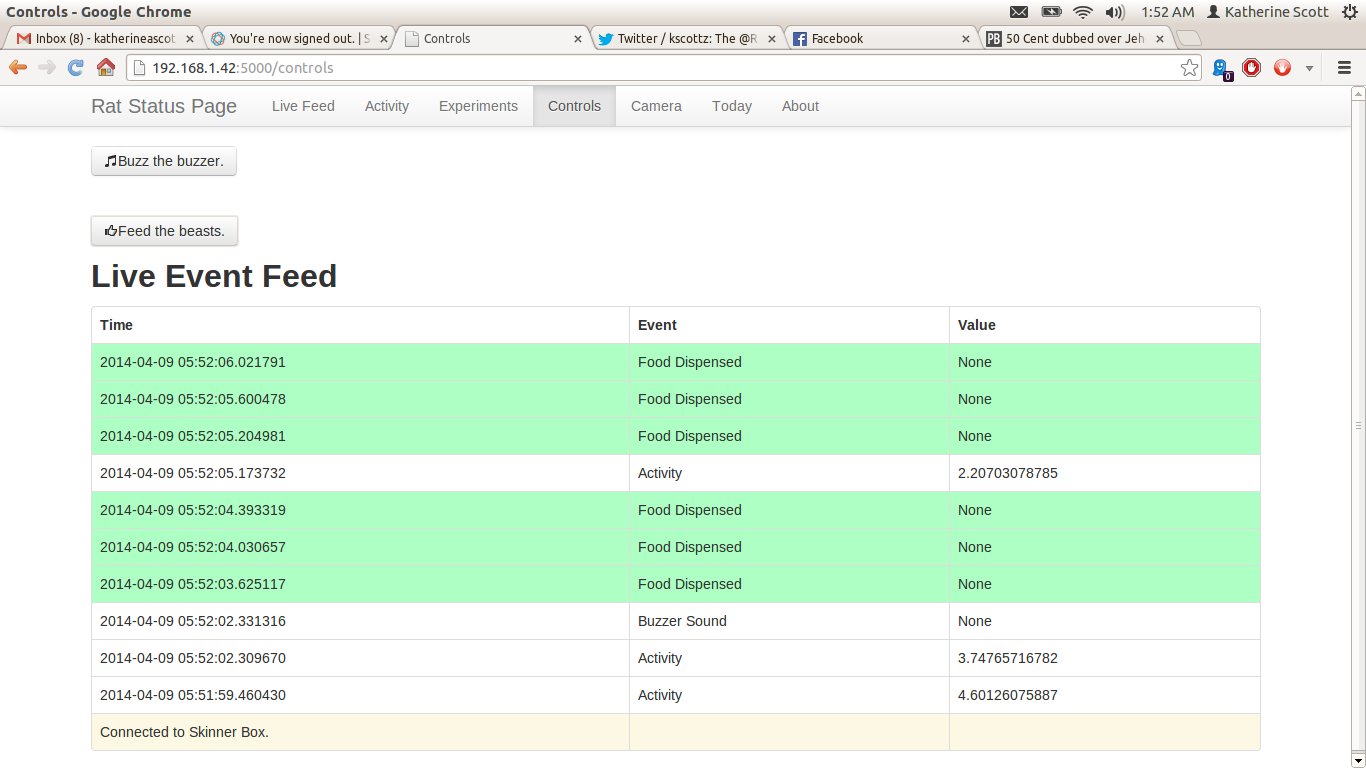
Live Events Feed
Putting it all together.
I have tested the system on the rats with some limited success (see the videos below). There are some kinks I still need to work out that prevent me from running the system full time. For example, the current food hopper wheel jams fairly frequently and so farm seems to only deliver food 2-3 times before jamming. Also the buzzer I used is exceptionally annoying, and since the rats live in my bedroom I don’t want to run protocols at night when the rats are most active(rats a nocturnal). Moreover, I don’t think my current pair or rats is suitable for training. I have one exceptionally old rat (almost three to be exact); and while she is interested she lacks the mobility to perform the task. The other rat has been one of the more difficult rats I have tried to train. Normal rats can learn to come when called (or when I shake the treat jar) this rat is either too timid or too ambivalent to care most of the time.
Building a Better Mouse Trap
The Skinner box runs reasonably well at the moment but there are quite a few things I would like to do to make it more user friendly and robust. Ultimately I would like to harden the designs and then turn them over to someone to commercialize. As with an engineering task design is a process, and you get a kernel of working code and then improve and build upon it until you finally reach a working solution. Here is what I would like to do in the next revision:
- Replace Mongo with Postgre SQL.
- Replace Matplotlib with a javascript rendering framework
- Fix the camera thread lock issue and create a live stream of video and also store images to the database.
- Move the food hopper to an auger based design to minimize jamming.
- Add a line break sensor to make sure the rats get fed from the food hopper.
- Add an IR LED illumination system for the camera and add a signal LED to work with the buzzer.
- Improve some of the chart rendering to support arbitrary queries (e.g. how well the rats did last week over this week.
- A scripting language for the experiment runner. Right now the experiment runner buzzes and waits for a button press, but really I think the rats should start with random food deliveries and work up to the button press task.



{kind=link}